


Adequate biomimicry in robotics necessitates a delicate balance between design and control, an integral part of making our machines more like us. Advanced dexterity in humans is wrapped up in a long evolutionary tale of how our fists of fury evolved to accomplish complex tasks. With machines, designing a new robotic manipulator could mean long, manual iteration cycles of designing, fabricating, and evaluating guided by human intuition.
Most robotic hands are designed for general purposes, as it is very tedious to make task-specific hands. Existing methods battle trade-offs between the complexity of designs critical for contact-rich tasks, and the practical constraints of manufacturing, and contact handling.
This led U.S. researchers to create a new method to computationally optimise the shape and control of a robotic manipulator for a specific task. Their system uses software to manipulate the design, simulate the robot doing a task, and then provide an optimisation score to assess the design and control.
Such task-driven manipulator optimisation has potential for a wide range of applications in manufacturing and warehouse robot systems, where each task needs to be performed repeatedly, but different manipulators would be suitable for individual tasks.
Seeking to test the functionality of the system, the team first created a single robotic finger design to flip over a box on the ground. The fingertip structure was automatically optimised by an algorithm to hook onto the box’s back surface and flip it.
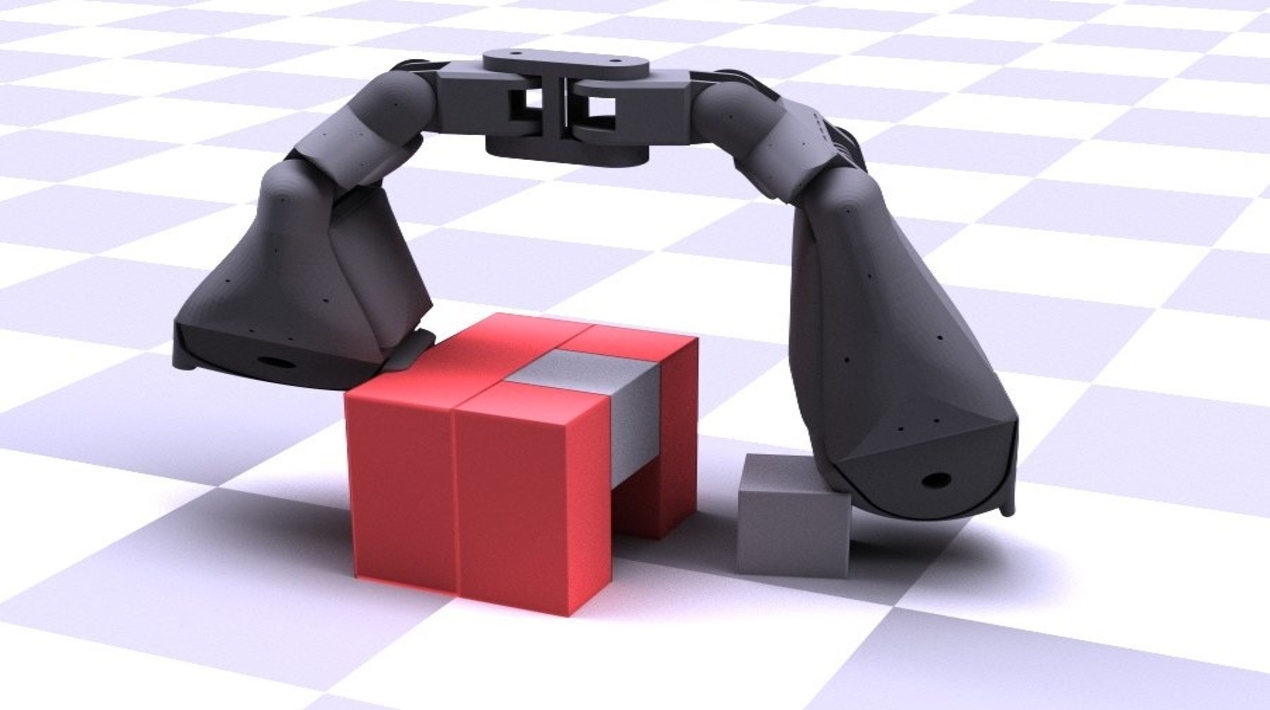
They also developed a model for an assembly task, where a two-finger design put a small cube into a larger, movable mount. Since the fingers were two different lengths, they could reach two objects of different sizes, and the larger and flatter surfaces of the fingers helped stably push the object.
Traditionally, this joint optimisation process consists of using simple, more primitive shapes to approximate each component of a robot design. When creating a three-segment robotic finger, for example, it would likely be approximated by three connected cylinders, where the algorithm optimises the length and radius to achieve the desired design and shape.
While this would simplify the optimisation problem, oversimplifying the shape would be limiting for more complex designs, and ultimately complex tasks. To create more involved manipulators, the team’s method used a technique called cage-based deformation, which essentially lets the user change or deform the geometry of a shape in real-time.
By using the software, the algorithm can automatically change the cage dimensions to make more sophisticated, natural shapes. The different variations of designs still keep their integrity, so they can be easily fabricated.
Using these simulation tools, the researchers do not need to evaluate the design by manufacturing and testing it in the real world. In contrast to reinforcement learning algorithms that are popular for manipulation, but are data-inefficient, the proposed cage-based representation and the simulator allows for the use of powerful gradient-based methods.
Not only does the team find better solutions, but also find them faster. As a result, they can quickly score the design, thus significantly shortening the design cycle. In the future, the team plans to extend the software to optimise the manipulators concurrently for multiple tasks.
U.S. researchers have been creating robots for a variety of purposes, including identifying and picking up objects. As reported by OpenGov Asia, U.S. researchers have developed robotic piece-picking systems which combine unique gripper designs with Artificial Intelligence (AI) and machine vision to help companies sort products and get orders out the door.
The robotic system is helping companies respond to two broad trends that have transformed retail operations. The first trend is the explosion of e-commerce, which has been accelerated during the COVID-19 pandemic. The other is a shift to just-in-time inventory fulfilment, in which pharmacies, grocery stores, and apparel companies restock items based on what has been purchased that day or week to improve efficiency.












