


In the realm of computer graphics and computer-aided design (CAD), 3D objects are commonly represented by the external contours of their surfaces. These shapes, known as “thin shells,” efficiently store and manipulate 3D models but may result in unintended visual anomalies.
For instance, when an animated character’s fingers bend, the hand may collapse in a manner reminiscent of an empty rubber glove rather than the natural movement of a hand with bones, tendons, and muscles. These disparities pose challenges, particularly when developing mapping algorithms that establish correlations between shapes.
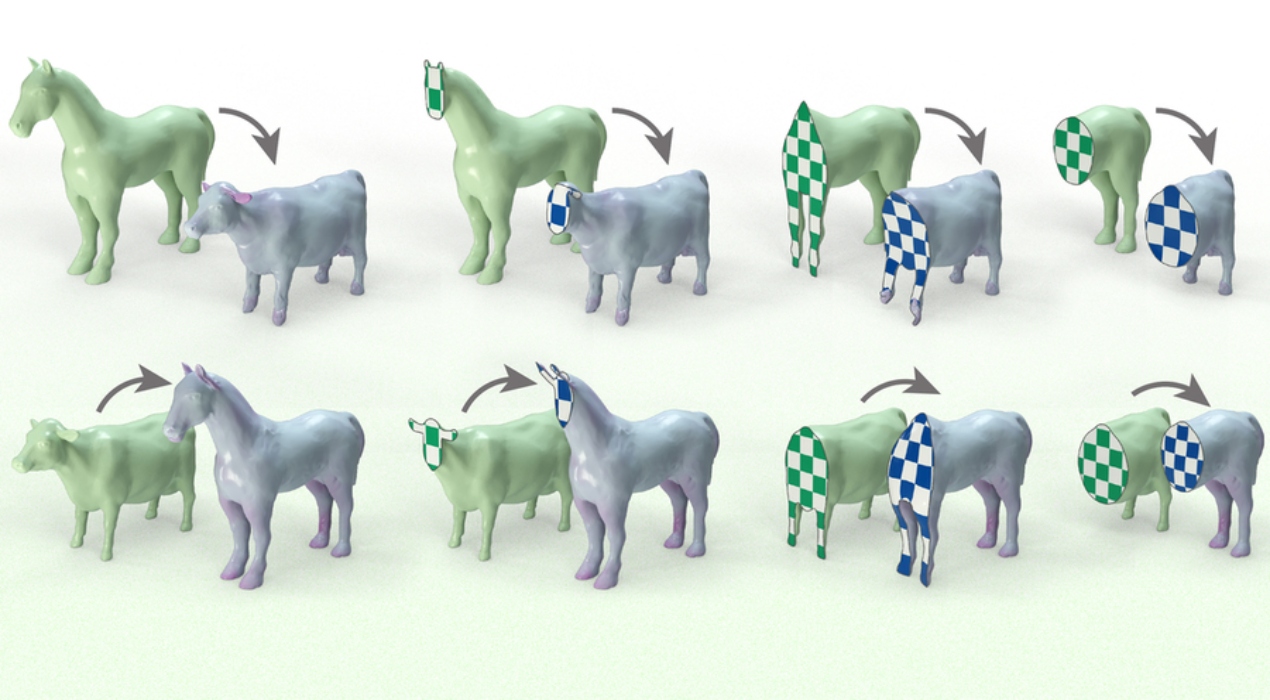
To overcome these limitations, a team of researchers from MIT has devised a solution that tackles the issue by aligning 3D shapes through mapping volumes rather than just surfaces. Their innovative approach involves representing shapes as tetrahedral meshes, which encompass the internal mass of a 3D object. By manipulating and stretching the vertices of tetrahedral within a source shape, their algorithm determines the optimal adjustments needed to align it with a target shape.
The method developed by the researchers offers an improved ability to model intricate details of an object by incorporating volumetric information. This approach effectively mitigates the issues of twisting and inversion that are commonly observed with surface-based mapping techniques.
“By transitioning from surface-based representation to volumetric representation, the entire hand is enveloped in the stretched rubber glove. This advancement in our method brings geometric mapping closer to replicating physical reality, enhancing the realism and accuracy of the models,” said Mazdak Abulnaga, an Electrical Engineering and Computer Science (EECS) graduate student who is the lead author of the paper on this mapping technique.
Abulnaga and his team devised a method that demonstrated superior effectiveness in aligning shapes compared to standard methods. As a result, it produced high-quality shape maps with reduced distortion compared to other competing alternatives. This algorithm proved particularly adept at handling complex mapping scenarios involving geometrically distinct input shapes, such as mapping a smooth rabbit onto a LEGO-style rabbit constructed from cubes.
While evaluating their approach, the researchers observed that it produced improved shape alignment maps compared to other volume-based methods, exhibiting higher quality and reduced distortion. Interestingly, utilising volume information yielded more accurate results even when focusing solely on the outer surface map.
Nonetheless, certain scenarios posed challenges for their method. For instance, the algorithm encountered difficulties when aligning shapes requiring significant volume changes, such as mapping a shape with a solid interior to one with a hollow cavity.
To address these limitations, the researchers aim to refine the algorithm further, particularly in reducing computation time. Additionally, they are actively exploring the application of their method in the medical field by incorporating MRI signals alongside shape data. This integration has the potential to bridge the mapping approaches utilised in medical computer vision and computer graphics.
Joel Haas, a Professor in the Department of Mathematics at the University of California at Davis, who was not involved in this research, explains that theoretical symmetry analysis influences the algorithm’s development. This analysis reveals that methods that consider symmetry in shape comparison tend to exhibit superior performance in object alignment.
Haas further points out that relying solely on surface data for alignments can lead to collapsed volumes, similar to what occasionally occurred to Wile E. Coyote in the “Road Runner” cartoons.
Through a series of experiments, it is evident that the new algorithm achieves remarkable success in maintaining internal consistency while aligning a pair of 3D objects. “It ensures a reliable alignment both within the interior and along the boundary,” Haas concluded.












