


To pick up objects without breaking them, most robotic grippers are comprised of rigid, expensive metals or soft polymers that melt at high temperatures. However, researchers from the National University of Singapore (NUS) and Northeast Forest University have developed a wooden robotic gripper that can be utilised in an extremely hot environment while still maintaining a delicate touch.
Another benefit of this inventive wooden robotic gripper is that it is powered by environmental variations in humidity, temperature, and illumination, which reduces energy use.
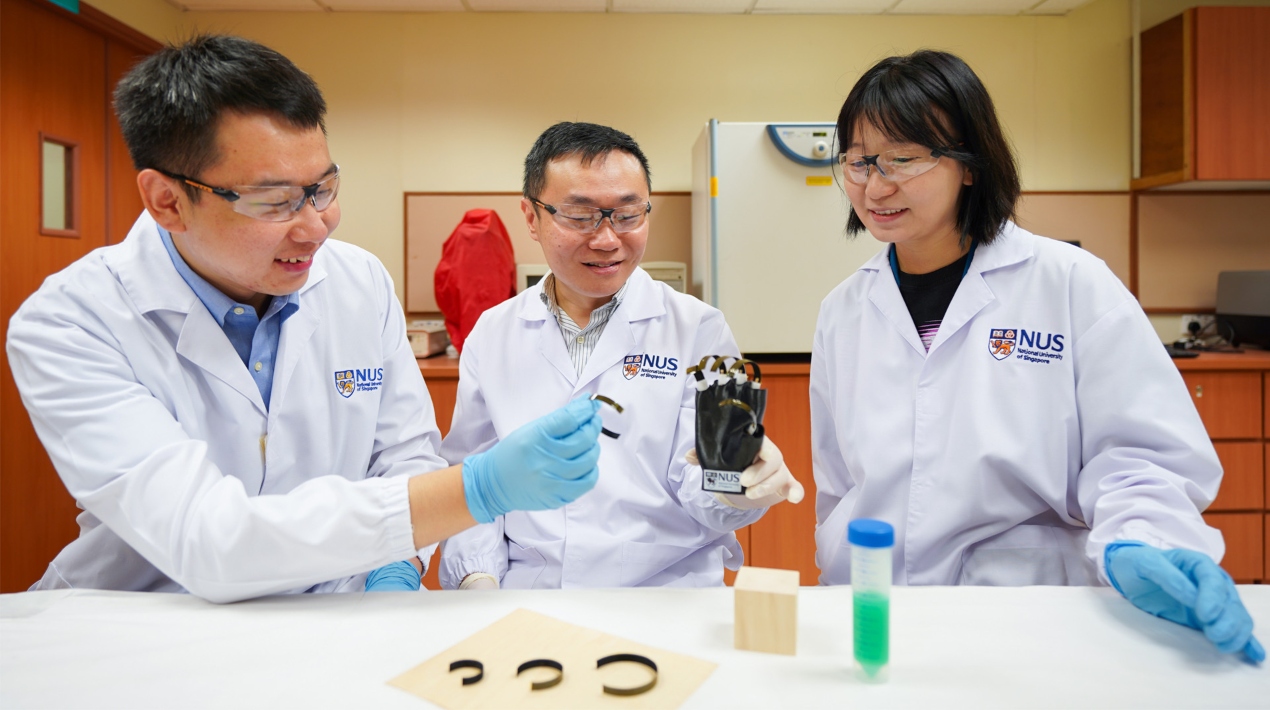
A research team from the Department of Materials Science and Engineering at the NUS College of Design and Engineering is led by Assistant Professor Tan Swee Ching. They claim that wood has excellent mechanical properties, natural deformation, is abundantly available, and is reasonably priced.
In their most recent work, they have demonstrated that the constraints of conventional actuators and manipulators can be overcome using wood-based robotic grippers.
He continued by saying that the wooden robotic gripper could spontaneously extend and bend in response to stimuli from moisture, heat, and light. Also, it has a wide operating temperature range, good mechanical qualities, is capable of performing complicated deformation, has low manufacturing costs, and is biocompatible. It distinguishes itself from traditional alternatives with these special qualities.
The hardwood gripper expands when exposed to high humidity (over 95% RH), and it closes tightly when the environment’s temperature rises above 70 degrees Celsius or when it is exposed to sunlight.
The 0.5 mm-thin pieces of Canadian maple wood were used by the researchers to construct the wooden robotic gripper. To get rid of the lignin, which is a substance present in plant cell walls, the wood pieces were first treated with salt chloride. To make the wood more easily absorb heat and light, the big pores in the substance are filled with a polymer called polypyrrole.
The group also created a brand-new nickel-based hygroscopic gel for absorbing moisture. The gel that absorbs moisture was applied on one side of the modified wood pieces. The opposite side was covered with a hydrophobic film. When exposed to high humidity, the wet-dry differential allows the wood to quickly absorb water vapours on one side, accelerating changes in the shape of the wooden gripper.
The wood pieces were then moulded into a gripper using specialised moulds at a temperature of 70 deg C. The hygroscopic gel absorbed moisture when exposed to an environment with 95% RH (also known as moisture stimulation), and the wooden gripper stretched and eventually extended outwardly.
The hydrophobic film layer was facing the light source when the researchers tested the wooden gripper under various light conditions. The moisture-absorbing gel started to lose water and the gripper started to bend inwards when the surface temperature of the gripper rose to around 42 degrees Celsius under the light illumination. Significant bending occurred at about 57 deg C.
The hardwood gripper showed durability and robustness for long-term use by remaining intact after 100 actuation cycles.Asst Prof Swee Ching and his team are presently working to enhance the functionality of the wooden gripper, including reducing the time needed for bending from the current 2 minutes, increasing the weight load it can support, as well as grabbing items of various shapes and sizes. Additionally, they are figuring out ways to cut costs and increase the production of the wooden gripper.
The team wants to produce an enhanced version of the wooden gripper to aid firefighters in carrying out rescue operations through further structural design and performance enhancement.












